this paper calculate depth maps based on background and moving object. it assume that the background is fixed. so, it is not fit for movie.
Two ways to get depth:
active:utilize ultrasonic or lasers to illuminate the work space,yield fast and accurate depth information
passive:based on computer vision,estimating depth information from acquired images and camera parameters
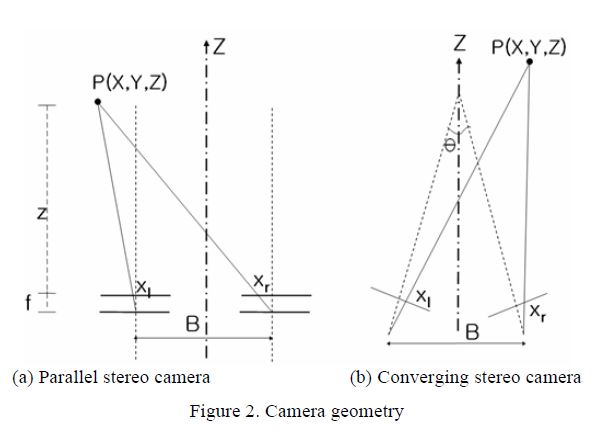
Disparity estimation problem: find the corresponding pair I1 and I2 of a single world point w in two separate image views.
 REAL-TIME DISPARITY ESTIMATION:
REAL-TIME DISPARITY ESTIMATION:
We assume that a stereo camera set does not move, and there is no moving object for a few seconds in an initialization step for generating background information. Accurate and detailed disparity information for background is estimated in advance, then only disparities of moving foreground regions are calculated and merged into background disparity fields.
Background disparity estimation:
block-based disparity estimation and spatial correlation
Foreground segmentation:
use a foreground segmentation technique using background subtraction and inter-frame based on the segmentation algorithm
Foreground disparity estimation:
for speed, only calculate boundary block
Two ways to get depth:
active:utilize ultrasonic or lasers to illuminate the work space,yield fast and accurate depth information
passive:based on computer vision,estimating depth information from acquired images and camera parameters
Disparity estimation problem: find the corresponding pair I1 and I2 of a single world point w in two separate image views.
We assume that a stereo camera set does not move, and there is no moving object for a few seconds in an initialization step for generating background information. Accurate and detailed disparity information for background is estimated in advance, then only disparities of moving foreground regions are calculated and merged into background disparity fields.
Background disparity estimation:
block-based disparity estimation and spatial correlation
Foreground segmentation:
use a foreground segmentation technique using background subtraction and inter-frame based on the segmentation algorithm
Foreground disparity estimation:
for speed, only calculate boundary block
No comments:
Post a Comment